-
- Presse
- Ahead
-
Vertrieb & Service Kontakte
-
Europa
Albanien Belgien Bosnien und Herzegowina Bulgarien Cyprus Deutschland Dänemark Estland Finnland Frankreich Griechenland Island Italien Kazakhstan Kosovo Kroatien Lettland Litauen Luxemburg Montenegro Niederlande Nordmazedonien Norwegen Polen Portugal Rumänien Schweden Schweiz Serbien Slowakei Slowenien Spanien Tschechien Türkiye Ukraine Ungarn Vereinigtes Königreich Österreich
- Mittlerer Osten & Afrika
- Nordamerika
- Lateinamerika
- Ozeanien
- Asien Pazifik
- China
-
Europa





Merkliste

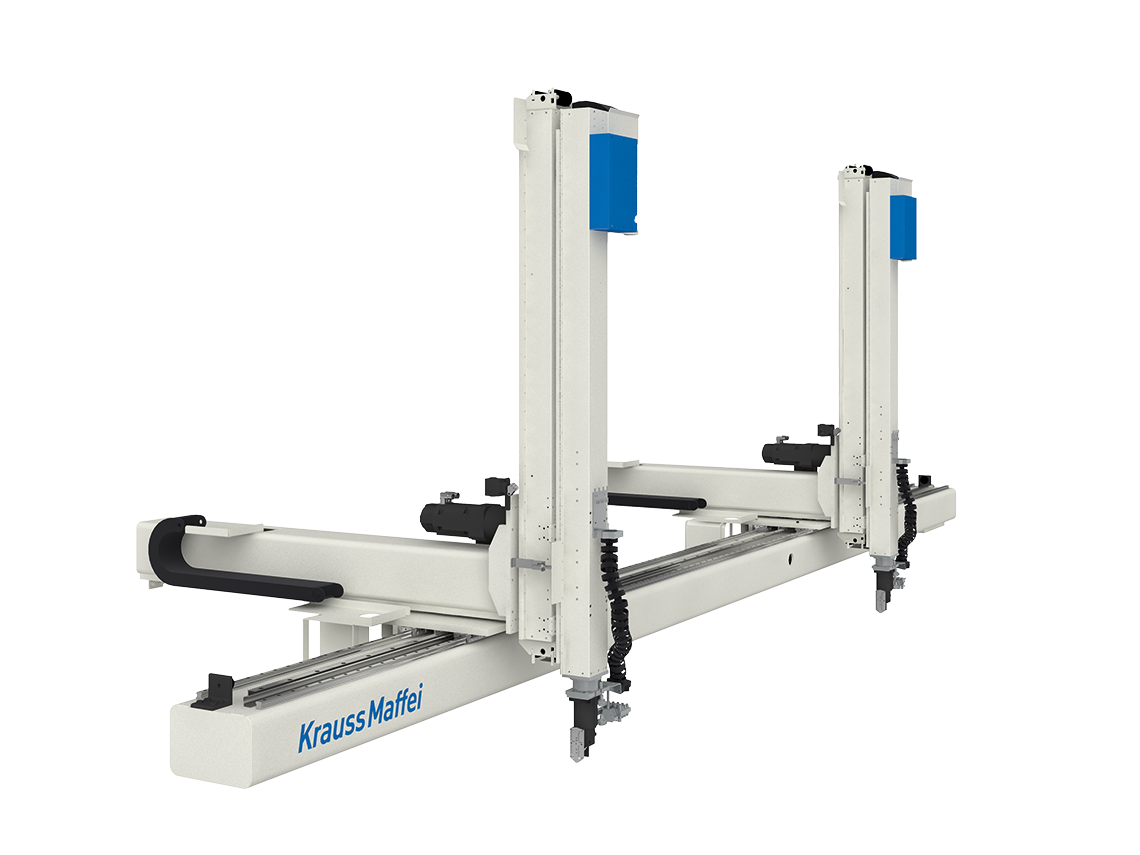
Linearroboter TWIN X / TWIN Z Baureihe
Flexible Kombinationsmöglichkeiten
Umsetzung auf Basis der MC6-Steuerung
Unterstützung von vier Robotern mit jeweils sechs Achsen (max. 24 Achsen)
Zentrale Steuerung der Bewegungen über das Anwenderprogramm
Zentraler Wechsel der Betriebsart
Varianten

Steuerungsähnliche Peripherieachsen
Merkmal
Zusätzliche Achsen (Peripherie) zum Standardroboter
Einsatz
Verwendung von Dreh- und Kreuztischen
Nutzen
Zentrale Steuerung auch für externe Achsen anwendbar
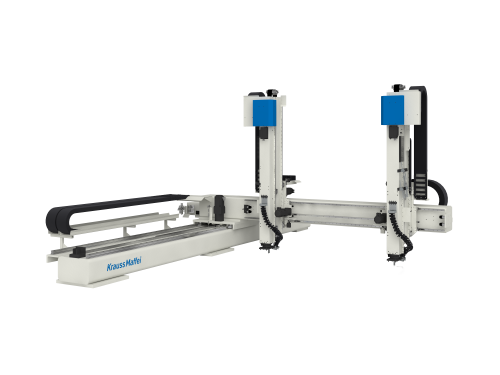
Twin X
Merkmal
Mechanisch gekoppelte Y-Achsen auf einer gemeinsamen X-Achse
Einsatz
Gleichzeitiger Entnahme- oder Einlegprozess im Werkzeug
Nutzen
Zeitersparnis bei der Verwendung von Dreiplattenwerkzeug

Twin Z
Merkmal
Mechanisch gekoppelte X-Achsen auf einer gemeinsamen Z-Achse
Einsatz
Übergabe von Bauteilen (Handshake) bei schneller Bauteilentnahme oder bei Stapelvorgängen
Nutzen
Platz- und Zeitersparnis bei Automationen mit überlappenden Bewegungsbereichen