Service



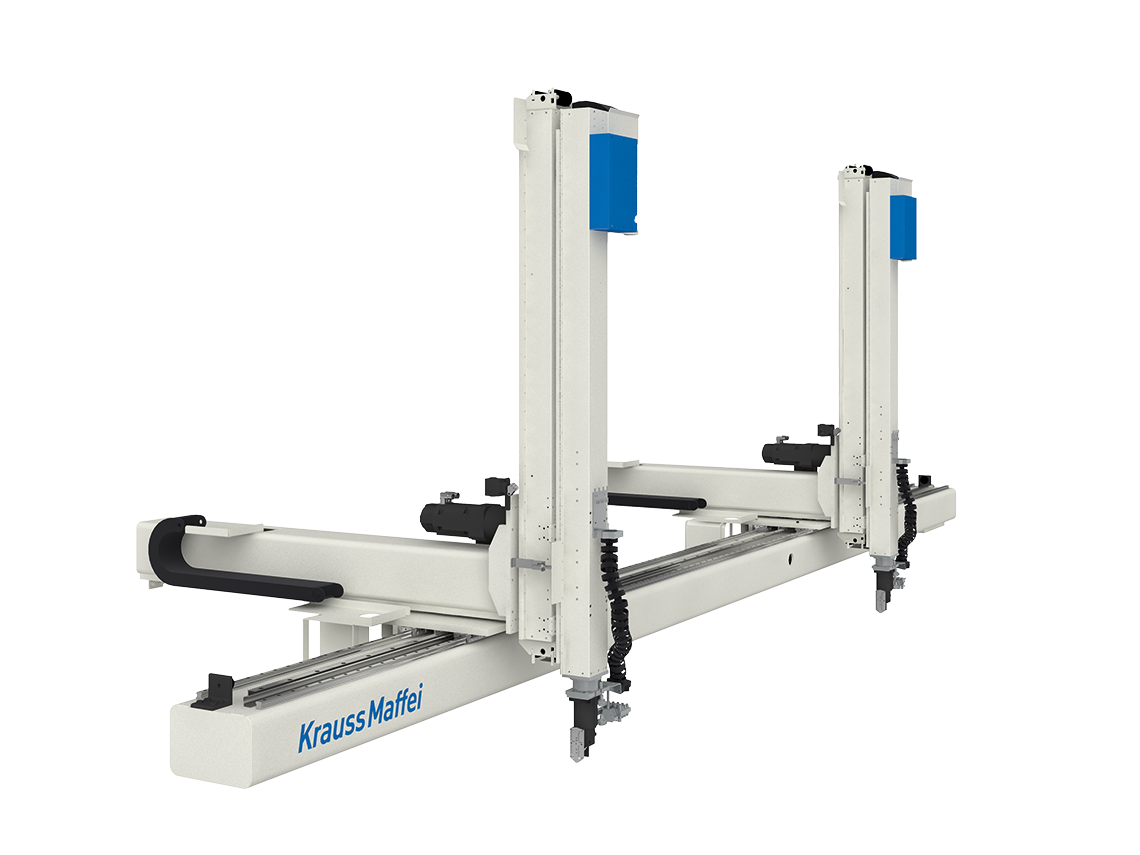
DANS LES VERSIONS TWIN X ET TWIN Z
Implémentation basée sur le système de contrôle MC6
Support de quatre robots, chacun avec 6 axes (max. 24 axes)
Contrôle centralisé des mouvements à l'aide du programme d'application
Modification du mode de fonctionnement centralisé
Variantes

Configuration du contrôle des axes périphériques supplémentaires
Caractéristique
Axes supplémentaires (périphériques) pour le robot standard
Application
Utilisation de plateaux tournants
Avantages
Contrôle centralisé
Twin X
Caractéristique
Axe Y relié mécaniquement à un axe X partagé
Application
Processus simultané de démoulage ou de placement dans le moule
Avantages
Gain de temps

Twin Z
Caractéristique
Axe X relié mécaniquement à un axe Z partagé
Application
Transfert de composants lors d'opérations rapides de retrait ou de superposition de composants