-
- Press
- Ahead
-
Sales & Service Contacts
-
Europe
Albania Austria Belgium Bosnia and Herzegovina Bulgaria Croatia Cyprus Czech Republic Denmark Estonia Finland France Germany Greece Hungary Iceland Italy Kazakhstan Kosovo Latvia Lithuania Luxembourg Montenegro Netherlands North Macedonia Norway Poland Portugal Romania Serbia Slovakia Slovenia Spain Sweden Switzerland Türkiye Ukraine United Kingdom
- Middle East and Africa
- North America
- Latin America
- Oceania
- Asia Pacific
- China
-
Europe





Bookmark

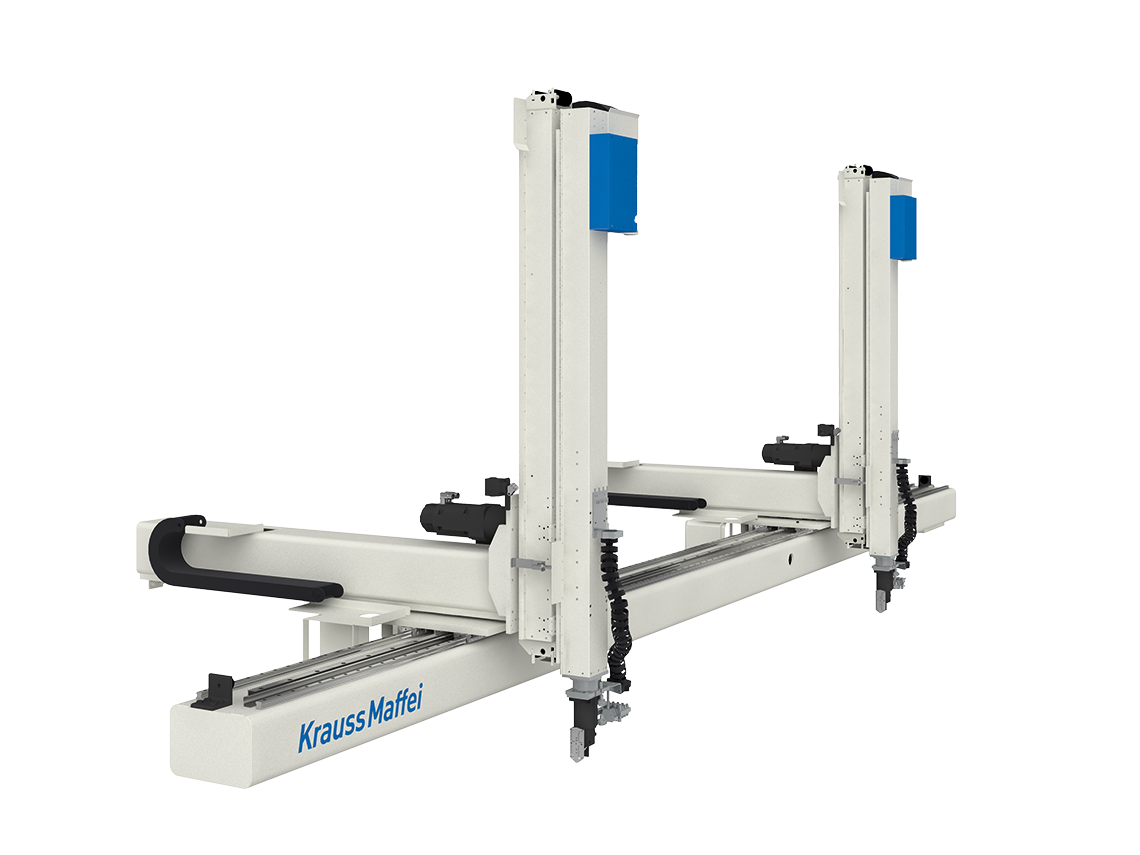
IN VERSIONS TWIN X AND TWIN Z
Implementation based on the MC6 control system
Support of four robots, each with 6 axes (max. 24 axes)
Central control of movements using the application program
Operating mode changed centrally
Variants

Configuration Control of additional peripheral axes
Characteristic
Additional axes (peripherals) for the standard robot
Application
Use of turntables and stages
Benefits
Central control, can also be used for external axes
Twin X
Characteristic
Mechanically linked Y-axes on a shared X-axis
Application
Simultaneous demolding or placement process in the mold
Benefits
Save time when using a three-plate mold

Twin Z
Characteristic
Mechanically linked X-axes on a shared Z-axis
Application
Transfer of components (handshake) during rapid component removal or stacking operations
Benefits
Space and time saved on automated units with overlapping motion ranges